"Русский переплет" зарегистрирован как СМИ.
Свидетельство о регистрации в Министерстве печати РФ: Эл. #77-4362 от
5 февраля 2001 года. При полном или частичном использовании
материалов ссылка на www.pereplet.ru обязательна.
|
|
24.08.2018
14:16 |
В США назвали сроки отправки астронавтов на Луну 
США анонсировали отправку экипажа на орбиту Луны Американские астронавты начнут работать на орбите Луны до конца 2024 года, заявил вице-президент США . . . |
|
24.08.2018
14:11 |
Ученые выяснили, насколько горячим является "кофе Шредингера"? 
Группа ученых из университета Эксетера (University of Exeter) обнаружила новые "неопределенные отношения", которые связывают точность, с которой может быть измерена . . . |
|
24.08.2018
14:06 |
Предсказана внезапная глобальная катастрофа 
Международная группа ученых выяснила, что переворот магнитных полюсов Земли может произойти внезапно и станет катастрофичным для стран, где распространены . . . |
|
24.08.2018
14:03 |
У людей нашли новый орган 
Ученые Института медицинских исследований Гарвана (Австралия) обнаружили у мышей и людей ранее неизвестные «микроорганы», которые участвуют в работе иммунной . . . |
|
24.08.2018
13:55 |
Предложен новый вариант одноатомного транзистора 
Транзисторы размером с один атом остаются неблизким, но неизбежным рубежом, после которого невозможно будет развивать данный тип электронных приборов . . . |
|
23.08.2018
16:18 |
В антиводороде впервые увидели переход позитрона из основного состояния в первое возбужденное 
Физики из коллаборации ALPHA впервые наблюдали в антиводороде позитронный переход между основным и первым возбужденным энергетическими уровнями. Этот переход . . . |
|
23.08.2018
15:59 |
Уточнена временная шкала зарождения и эволюции жизни на Земле
Новое исследование использовало комбинацию геномных и ископаемых данных, чтобы объяснить историю жизни на Земле от ее происхождения до наших дней. Палеонтологи . . . |
|
23.08.2018
15:50 |
Власти Японии хотят создать в стране водородную энергетику 
Нехватка энергоресурсов побуждает Японию искать все новые источники энергии с упором на возобновляемые. После аварии на АЭС «Фукусима» в 2011 году Страна . . . |
|
23.08.2018
15:35 |
Ученые: Не создавать пробок на дорогах «научат» муравьи 
Специалисты исследовали поведение насекомых при рытье узких туннелей и построили эффективную математическую модель, помогающую избежать заторов. Метод уже . . . |
|
23.08.2018
15:15 |
Ученые: «Веселящий газ» спас жизнь на Земле в эпоху тусклого Солнца 
Американские специалисты пришли к выводу, что почти два миллиарда лет назад Землю согревал парниковый эффект, вызванный большим содержанием в атмосфере планеты . . . |
|
23.08.2018
14:33 |
Как птицы чувствуют магнитное поле
Во время миграций тростниковые камышевки выбирают направление полета с помощью клюва. Известно, что многие животные могут ориентироваться по магнитному полю . . . |
|
23.08.2018
14:31 |
Наполеон проиграл Ватерлоо из-за извержения вулкана в Индонезии 
Историки знают, что существенную роль в поражении французских войск при Ватерлоо сыграла плохая погода. А физикам, кажется, удалось объяснить, как она получилась . . . |
|
23.08.2018
14:26 |
Энергия будущего: в России представили прототип электростанции нового поколения 
В России представили прототип уникальной электростанции, которая обладает рядом преимуществ по сравнению с традиционными установками, предназначенными для . . . |
|
23.08.2018
13:48 |
Инженеры создали систему прямой связи между самолетом и подлодкой 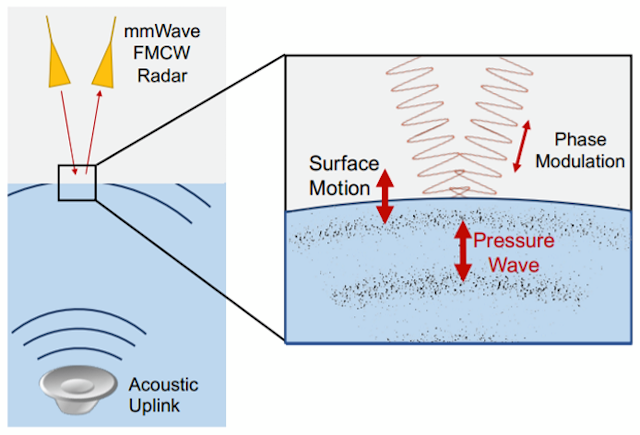
Американские инженеры показали в действии прототип системы для прямой связи между подводными и летательными аппаратами. Она состоит из подводного акустического излучателя, звуковые волны от которого вызывают колебания поверхности воды, и радара, который считывает эти колебания и фильтрует их от колебаний, вызванных естественными волнами на поверхности воды. Разработчики успешно испытали прототип системы в бассейне с плавающими людьми и передатчиком, размещенным на глубине 3,5 метра. Разработка была представлена на конференции SIGCOMM 2018.
Связь с подводными лодками и исследовательскими подводными аппаратами представляет собой большую проблему. Радиосигналы с наземных станций, спутников или самолетов быстро поглощаются водой и не могут проникать глубоко под поверхность воды, а акустические сигналы, относительно далеко распространяющиеся под водой, практически не переходят через границу воды и воздуха. Из-за этого для связи с подводными аппаратами используются промежуточные устройства, которые располагаются на поверхности воды или под ней, но связаны через кабель с поверхностью, и преобразуют акустические сигналы в радио- или электрические сигналы и наоборот. Такой способ обладает множеством недостатков. К примеру, он слабо применим для связи с подводными лодками, потому что для этого необходимо создать огромную сеть из ретрансляторов в океанах.
Франческо Тонолини (Francesco Tonolini) и Фадель Адиб (Fadel Adib) из Массачусетского технологического института создали систему связи, позволяющую подводным аппаратам «общаться» с летательными аппаратами напрямую через границу между водой и воздухом и основанную на особенностях взаимодействия обоих типов сигналов с этой границей. Система состоит из акустического передатчика под водой и радара над водой. Акустический передатчик излучает волны на частотах от 100 до 200 герц, которые распространяются к поверхности воды. При достижении поверхности воды волны вызывают периодические колебания уровня воды на несколько единиц или десятков микрометров.
Измерить такие изменения уровня воды напрямую довольно затруднительно. Вместо этого инженеры использовали радар, работающий в миллиметровом диапазоне, и решили измерять не время пролета сигнала, а периодические изменения в фазе сигнала, происходящие при отражении от колеблющейся воды.
Радар излучает сигнал с частотной модуляцией с несущей частотой 60 гигагерц. Разработчики выбрали эту частоту, потому что такой сигнал достаточно сильно меняется от колебаний, вызванных акустическим сигналом передатчика, но не приводит к хаотическому изменению частоты от естественных волн. Поскольку естественные волны имеют частоту от десятых долей до единиц герц, их достаточно просто отфильтровать и выделить на их фоне сигнал передатчика с частотой в 100-200 герц. Для кодирования информации инженеры выбрали метод мультиплексирования с ортогональным частотным разделением каналов (OFDM), при котором сигнал передается одновременно на нескольких поднесущих частотах. Эта же схема кодирования используется в стандартах связи Wi-Fi и LTE. Эксперименты показали, что скорость передачи сигнала составляет до 400 бит в секунду.
Инженеры провели серию испытаний в емкости с водой, а также в бассейне с глубиной 3,5 метра, в котором также плавали люди, создающие волны. Испытания показали, что система способна работать при волнах с амплитудой 8 сантиметров (суммарной разницей высоты 16 сантиметров).
Разработчики отмечают, что пока у системы есть несколько важных недостатков. Использованная ими схема позволяет проводить только односторонние сеансы связи. Кроме того, пока она не может работать в условиях больших волн. Инженеры предполагают, что это ограничение можно частично устранить, оборудовав акустический передатчик и радар системой отслеживания волн на поверхности, которая позволит в реальном времени подстраивать сигналы под условия на поверхности воды. Наконец, система требует, чтобы радар находился практически вертикально над передатчиком.
В 2016 году Министерство обороны России начало развертывание подводной системы гидроакустического обнаружения и наблюдения «Гармония». Она состоит из устанавливаемых на дне роботов, которые проводят пассивную или активную гидроакустическую разведку и периодически выпускают на поверхность буи для передачи данных на командный пункт.
По информации https://nplus1.ru/news/2018/08/22/tarf
�
|
|
23.08.2018
10:14 |
ESA запустило спутник для наблюдения за ветрами в стратосфере 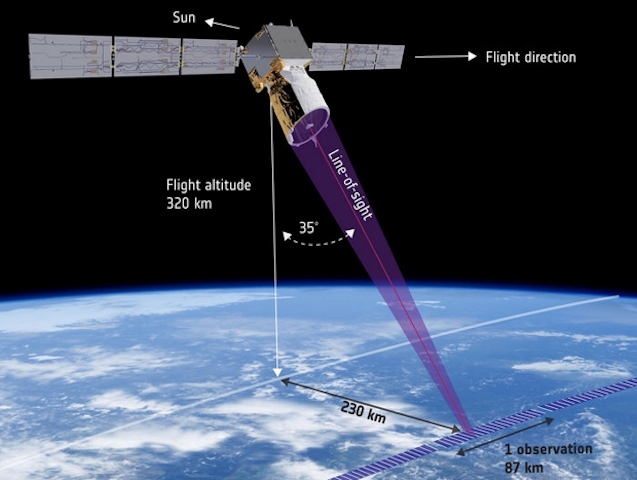
Европейское космическое агентство запустило спутник ADM-Aeolus, предназначенный для наблюдения за ветрами в стратосфере. Предполагается, что сбор точных данных о . . . |
|
23.08.2018
10:09 |
Звезды Млечного пути формировались в два этапа с большим перерывом 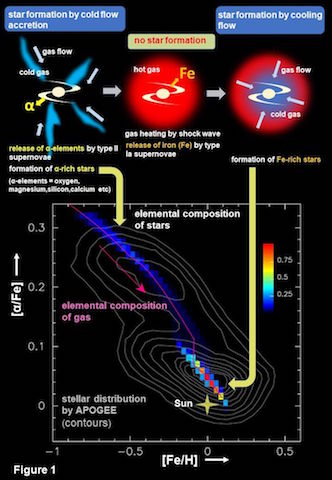
Галактика Млечный путь однажды «умерла», и теперь мы живем в «переродившейся» галактике. Расчеты, проведенные Масафуми Ногучи (Masafumi Noguchi) из Университета Тохоку, . . . |
|
23.08.2018
10:06 |
Необычная карликовая галактика-кандидат с активным звездообразованием 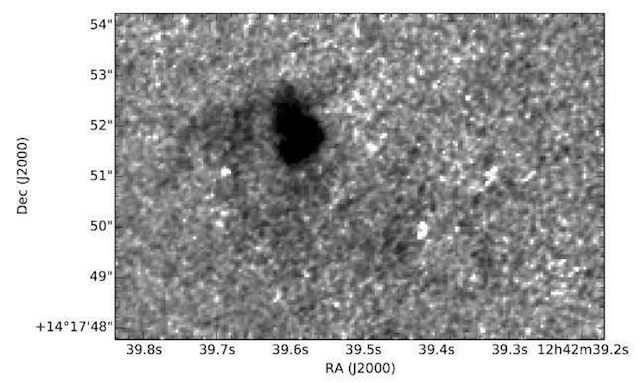
Европейские астрономы провели исследование карликовой галактики-кандидата с активным звездообразованием, расположенной в гало галактики NGC 4634. Это новое . . . |
|
23.08.2018
09:51 |
Пятая фундаментальная сила? Легкая частица поможет понять темную материю 
Новые находки, указывающие на возможное открытие прежде неизвестной субатомной частицы, могут быть свидетельством существования пятой фундаментальной силы . . . |
|
22.08.2018
23:35 |
Создан антилазер для атомного конденсата Бозе—Эйнштейна
Международный коллектив ученых разработал первый в мире антилазер для идеального поглощения волн в конденсате Бозе—Эйнштейна. На этом примере ученые впервые . . . |
|
22.08.2018
23:23 |
«Интернет животных» станет реальностью? 
На прошлой неделе космонавты на МКС смонтировали и наладили работу одной специальной антенны, которая предназначена для проекта «ICARUS». Международное . . . |



{kind=link}